PlaneWave L-500赤道儀の故障と対応 "再来"
不吉なタイトルですねw
前回の冒頭で2回修理したと記載しました。前回が1回目の顛末で今度は2回目の顛末を書こうと思います。
「PlaneWave L-500導入 - 計画から設置・調整まで -」の記事はご覧いただけましたでしょうか?かなり長ったらしい記事で読みにくいかと思いますが、業者丸投げではなくDIY的に据え付け赤道儀を導入する際の参考になるように心がけたつもりでした。
いくつか追記をしていますが、赤道儀の制御ソフトであるPWI4の初期設定の記述もある関係でPWI4がバージョンアップした場合はその記事の更新もしなくちゃ、と思っていました。
動いているものはイジらない主義の私でも最近のバージョンアップにはスルーできないものがありました。PWI4の目玉機能として「事前にプレートソルブを済ませておく」というものがあります。簡単にいうと全天、と言っても視野90度くらいを満遍なく自動プレートソルブしておくと撮影の都度プレートソルブしなくてもちゃんとど真ん中に対象を自動導入できるという便利機能です。モデリングと呼んでいます。ただPWI4自体には撮影機能がありませんでしたので他社のソフト、しかもMaxImDL決め打ちで必須というちょっと信じられない欠点がありました。それがついにPWI4自体に撮影機能が組み込まれて他社ソフトが要らなくなるというほぼ必須のアップデートだったのです。
2025年5月のある日
というわけでPWI4 ver4.1.6にアップデートしましたところ、1回目のPWI4起動でモーターチューニング〜モデリング〜自動導入と順調でした。その日は一旦電源を落とし翌日の撮影準備で夕方再起動したところ接続エラーになりました。
2025-05-05 16:57:23.047: ERROR
Fatal error occurred in Elmo controller service
Unable to connect to mount controller: Axis 0 communication channel not found. Is the device plugged in and turned on?
前回の記事と文言は違いますが内容は同じのようです。
またかよ。

デバイスマネージャにはCOMポートが1つありますがこれは違うUSBデバイス(ローテーター)のものです。正しく接続できている場合は以下のようにPlaneWave用に2つのCOMポートが設定されるはずです。しかも上の図は字が小さくて見づらいですが 一番上に"Stellaris Device Firmware Upgrade"という見慣れないものが現れています。なんだろこれ?

また例の電圧降下だろうか?と思い「L Series Mount - Electrical TroubleShooting」を引っ張り出して測定してみます。
Main Board Voltage Measurements
3-b. 3.326v
3-c. 4.89v ☜ちょっと低いかも、誤差かな?
3-d. 12.21v
3-e. 48.5v
3-f. 48.5v
4-b. 12.25v
5-b. 48.5v
Motor Phase Ringout Azimuth/RA Motor
6. 0Ω
7-a. 0Ω(低抵抗なので安定しない)
7-b. 0Ω(低抵抗なので安定しない)
7-c. 0Ω(低抵抗なので安定しない)
7-d. ∞
7-e. ∞
7-f. ∞
Motor Phase Ringout Altitude/DEC Motor
6. 0Ω
6-a. 0Ω(低抵抗なので安定しない)
6-b. 0Ω(低抵抗なので安定しない)
6-c. 0Ω(低抵抗なので安定しない)
6-d. ∞
6-e. ∞
6-f. ∞
うーん、問題ないように見えます。さあ困った。
ま、とりあえずサポートに連絡だ。
今回は"Stellaris Device Firmware Upgrade"というものが現れたけどこれ何?
という質問もしました。もちろん別のPC、ケーブル交換、ケーブル長を短く、などやれることはやりました。
返信には
セットアップで、接続設定を"イーサネット"にし、"ファームウェアの更新とハードウェアIPアドレスの設定"をクリックします。"L-Series Mount Interface Setup"ウィンドウが表示されます。この方法で接続できるか確認してください。接続できない場合は、ウィンドウの手順に従い、Lメインボードのディップスイッチ(添付写真参照)を "Force Boot Mode"に切り替え、電源を再投入します。
"L-Series Mount Interface Setup"ウィンドウを設定に戻し、"Force Boot Mode "を選択します。これでファームウェアファイルが表示され、適切なパラメータでボードがリフレッシュされます。
という簡潔な文章が送られてきました。
添付資料は以下の4枚。
ここでしばらく"お勉強"モードに入ったのは言うまでもありません。



 しかし "Force Boot Mode"のDIPスイッチの小さいこと!
しかし "Force Boot Mode"のDIPスイッチの小さいこと!
やってみました、Upgrade Successful どうやらうまくいった模様です。
この時点での”接続設定をイーサネットにし” は、”Firmware uthility”リンクがイーサネットモードにしないと現れないからであってLANケーブルを接続するわけではありません、ここ混乱しますよね。


"Stellaris Device Firmware Upgrade"については何の説明もなかったので調べてみたところ、USBデバイスのファームウェアを更新するためにWindowsに組み込まれたメカニズムで略してDFUと呼ばれているものだそうです。今回のようにUSBデバイス側がファームウェアをアップデートする特別なモードになった時にデバイスドライバとして現れるWindowsの仕組みということですね。じゃあなんでPWI4をアップデートして再起動しただけで(Force Bootスイッチを変えてないのに)DFUモードになったのでしょうか?どうも腑に落ちません。
ちなみにWindowsのDFUはWindows10の初期は"Tiva Device Firmware Upgrade"で、Windows Updateをしていくと途中から"Stellaris Device Firmware Upgrade"になり、Windows11では最初から"Stellaris Device Firmware Upgrade"が組み込まれています。
PWI4のようにDFU機能を使うソフトウェアの場合はDFUドライバを自分でアップデートしてしまうかもしれません。なお Stellaris Device Firmware UpgradeドライバはTI(テキサスインストルメンツ社)の製品です。
"DFU"でネット検索するとiPhoneのDFUの仕組みがまずヒットすると思いますが壊れたファームウェアをリセットするという目的はWindowsも同じです。
PCを再起動してL-500の電源を入れると、あ、直ってる。よっしゃ🙌
原因?いいじゃない直ったんだから。☜これが甘かった

さて、ここから混迷を深めていきますw
上記の上手くいったPCはテスト用に用意した暫定のPCでしたので、元々のPCで接続できるようにしなければいけませんでした。まず元のPCにWindows10をクリーンインストールしてWindows Updateを行い最新にします。各種ドライバやアプリをインストールします。L-500をUSBケーブルで繋ぎ電源オン。
えー?接続エラー? →記事の最初に戻るw
ファームもアップデート成功してDIPスイッチも元に戻してるのにおかしい、というかこの状態はこのトラブルのふりだしみたいなんですけどー
この先の詳細を説明してもこの記事が混迷するので大幅に省きますが、つながる時とつながらない時がある、つながるのはごくまれ。という厄介な状態になっています。
サポートには正直にその状況を報告しましたところ、次の返信が。
"強制再起動" モードは、主にファームウェアがめちゃくちゃになった場合に再フラッシュするために使用されます、まだ問題が発生しているのであれば、ファームウェア自体が根本的な原因ではない可能性があります。←私もそう思う
あなたがおっしゃるように、断続的な接続と特定のエラーメッセージのため、これを切り分けるのは少し厄介です。チームと話し合った結果、ひとつの提案として、PWIの中間バージョンを試してみることを提案します。バージョン4.0.16は比較的うまく動作しているようですので、バージョン4.1.4をテストし、問題が再発しないかどうかを確認することは有益でしょう ←診断プログラムとかないんですかね
結局、PWI4のバージョンを変えても接続が安定しません。WindowsはUSBデバイスを認識したり切れたりした時にそれぞれ別の音がなりますよね、その音で接続オンと接続オフが勝手に起こっているのがわかります。
この後、サポートと数回相談してイーサネット(本当にLANケーブル)での接続や、Linuxマシンからの接続を試してダメでしたのでようやくハードウェア(前回と同じメインボード)が怪しい!となりました。ここまでで障害発生から11日目です、ふぅ。
日本とアメリカでは時差が大きいのでメールの回答が翌日になってしまうのがもどかしいです。
保証期間内の不具合に対してはRMA(Return Merchandise Authorization)、つまり返品承認の番号が発番され無償での修理または交換になります。PlaneWave赤道儀の保証期間は2年でこの個体は購入して2年を超えています、ですが前回の不具合もメインボードでしたのでその際に保証期間がリセットされて今回も無償修理or交換となりました。
L-500のメインボードは#L500501という型番で販売店を通した購入価格は$500だそうです、個人的にはそれほど高くはないという印象です。
打ち消し線を引いている理由はお察しくださいw
配送の方法は前回と同じです。
これが先方からの送り状ですが、もしも税関で止められた場合は羽田での送り状の差し替えは可能ですので先方に事情を説明してPDFで自分宛にメールで送ってもらってください。それを通関代行業者(UPS)のアドレスに送ればOKです。

で、程なく交換品(リビジョンは同じでシリアルが変わってた)が届いて、取り付け後正常に動作することが確認できました。
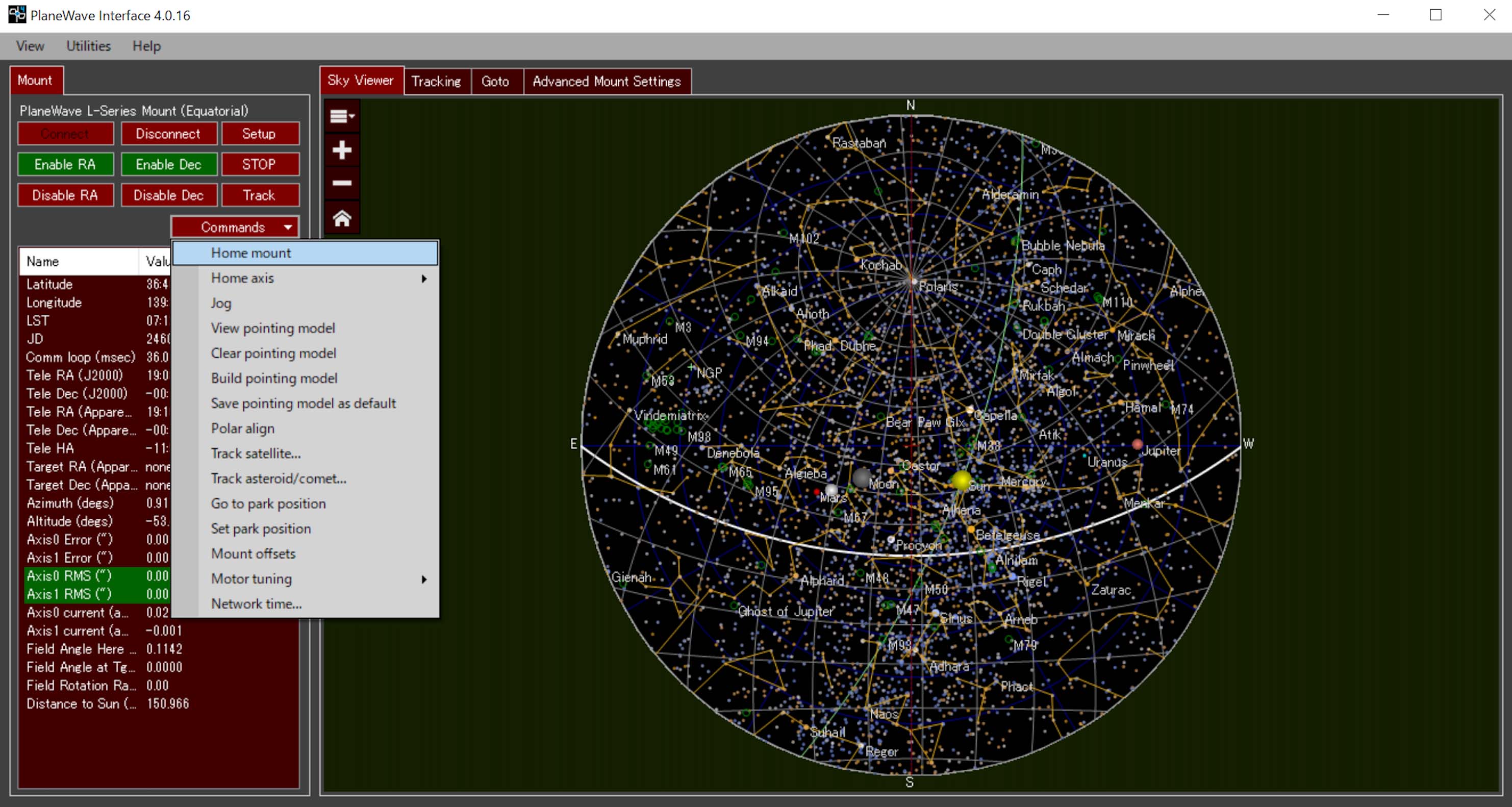
これがこの時点の最新版PWI4 ver4.1.6です。(Cameraタブがないのはカメラの電源を入れていないせいです) 重量バランスが取れていてモーターチューニング動作が完了していれば赤緯/赤経モーターの揺らぎが0.07秒角以下に収まると思います。

PlaneWaveでは徹底的に調査する、とは言ってましたが結果をフィードバックするとは言ってませんのでハードウェアに欠陥があったのかファームウェアが正しく更新できていなかったのかというトラブルの原因は分からずじまいです。
でも、とにかくタダで直ったんだからそれで良しとしよう。
今回も長くなりましたね。
おしまい... であってほしいw
PlaneWave L-500赤道儀の故障と対応
良い赤道儀は一生もの
という話は聞き覚えがあるベテランの方は多いのではないでしょうか?
赤道儀の心臓部(最もコストをかけている部品)は減速ギアであることは想像していましたし、正確に星を追尾する性能はその部品の精度に特に依存しているという事実は誰も否定できないでしょう。
ところがダイレクトドライブという赤道儀、減速ギアが存在しない、つまり24時間で1回転しかしないモーターが搭載されているという従来の常識からは想像しにくい製品がPlaneWave Lシリーズ赤道儀です。
ダイレクトドライブというとレコードのターンテーブルを連想する方が多いと思いますが、昔のオーディオではターンテーブルの回転ムラ(ワウフラッターと呼ばれてたと思います)が大問題で、それまでベルトドライブで回転させていた方式をモーターとターンテーブルを直結したダイレクトドライブ方式にして精度と安定性を高めた製品がデンオン(現デノン)から発売されて今でも名機と呼ばれてたりします。
これを赤道儀に搭載した場合、メリット・デメリットはどうなるでしょう?
ある程度使用した上で主観的ですが感想を書いてみます。
メリット
・機械的精度を追求すべき部品が減りコストが削減できる
・機械的精度が省ければ必要な剛性もハードルが下がり総重量が減る
・重くないなら故障やメンテナンスがセンドバックで行えるため保守契約や出張保守の機会が減る
・高速回転部品がないため摩滅による劣化が少ない
デメリット
・追尾精度を担保するための電子部品やソフトウェアの故障時はユーザー自身や国内業者が対応することが難しい(かもしれない)
・電子部品は長期間(数十年レベル)使用し続けることは難しい、ケミコンの寿命なんて10年くらい?
・歴史が浅いため耐用年数に不安がある
・モーター本体、エンコーダーが高価でこれらが故障した場合は修理費用が高額になる(ハズ)
さて、本題ですが
私がアメリカの販売店から購入したPlaneWave赤道儀は、2022年12月末から現在2025年8月の間に2回修理(部品交換)しています。今回の記事はその顛末を報告したいと思います。
2024年9月
観測所のある日光は山地のため夏は雷雨が多いです、その日は雷雨明けの翌日だったと思います。遠隔地リモートではなく現地(の住居)からいつものようにリブーターから撮影用PCやカメラや赤道儀の電源を入れてリモートデスクトップ上で専用の制御ソフトPWI4から赤道儀L-500に接続すると
ERROR
Axis 0 communication channel not found. Is the device plugged in and turned on?
が表示され接続できません、どうやらCOMポートが無いと言っているようです。
デバイスマネージャにもCOMポート(仮想COMポート)が出てきません。

一般的にCOMポートは使用する周辺機器がデバイスとして認識されて初めて設定されますので、赤道儀の電源が入ってないとか、とにかくUSBデバイスとして認識されてないという状態のようです。以前より自宅からリモートで使用した時もこの問題があって使用できなかったケースがありまして、その時は電源をオフオンして無事に使用できたのでした。
今回は現地ですので見に行ってみると、冷却ファンの音が聞こえるので電源は来てますね。USBケーブルの接続の確認、ケーブルの交換、別のPCに繋いでみるなど一通り切り分けしましたが繋がりません。やばい、もしかして雷サージ?
仕方ないので購入したアメリカの販売店にメールで連絡を取ったところ、PlaneWave社のサポートに連絡して直接問い合わせてほしいと言われ support@planewave.com へ状況を報告しました。海外メーカーは大体そうなのかもしれませんが1件の事案に対して1人の担当者が継続的に対応してくれます。
最初にチケット番号が返信されてきますので以降のやりとりはその番号をタイトルに含めると混乱がなくて良いです。
こちらからはシリアル番号(機体の銘板にある)、PWI4のバージョン、購入日、購入店名、試した対策などを知らせます。PlaneWave社の場合はシリアル番号によって個体管理(保証期間、基盤のリビジョン、履歴など)しているようです。
ソフトウェアの設定の問題が原因の可能性がある場合などはリモートメンテを行えるようで当該PCでTeamViewerが動作可能か?などと聞かれます。
症状からメインボードが動作していない可能性を想定したらしく以下のPDFファイル(8ページ)が送られ、手順通りに基盤の電圧をチェックしてくれという返事でした。
これをとんでもないと感じるか、ワクワクするか、ユーザーが試される場面ですねw


道具、と言っても千円未満のテスター1個だけですが持ってますので粛々と(念のため
DeepLで翻訳しながらw)チェックしていきます。
その結果はPDFの1ページ目では3.3V,5V,12V,48Vの4つの電圧の内、一部変な電圧になっています。
Main Board Voltage Measurements
3-b. 0.920v ☜ここは3.3Vのはず
3-c. 2.367v ☜ここは5Vのはず
3-d. 12.21v
3-e. 48.5v
3-f. 48.5v
4-b. 12.25v
5-b. 48.5v
Motor Phase Ringout Azimuth/RA Motor
6. 4Ω
7-a. 0〜39Ω(低抵抗は正確に測るのが難しい)
7-b. 0〜16Ω
7-c. 0〜80
7-d. ∞
7-e. ∞
7-f. ∞
Motor Phase Ringout Altitude/DEC Motor
6. 0Ω
6-a. 0〜30
6-b. 0〜60
6-c. 0〜121
6-d. ∞
6-e. ∞
6-f. ∞
証拠写真を撮ってメールでサポートに送ったところ
"電圧不足のため修理が必要かもしれない、保証期間内なので修理代は無償だが送料を負担してくれるのなら送ってくれ"
とのこと
これが問題のメインボード

送付方法としては、FedexやDHL,UPSは高いので国際郵便(EMS)にしました。
日本郵便のホームページにEMS書類作成の画面がありますのでそこに入力して送り状と税関告知書をプリント出力して郵便局へ持っていきます。
品名欄に必ず "No Battery No Glue" を記載してください。
(下の書類はその記載が無くて拒否られてます)
部品の場合は価格が不明だと思いますが常識的な価格でOKですw
たーだーしw 関税がかかる国や品目の場合、高すぎる価格を記載すると受け取り側の関税負担が大きくなりますのでなるべく少ない金額にした方がいいです。

修理品や交換品を相手から送ってもらう場合は、アメリカ→日本では関税は免除ですが消費税はかかります。
無償修理なんだからゼロだよね、とか考えて$0なんて書かれて送られると通関で止められ最悪の場合廃棄または返送されます。PlaneWaveはこちらから何も言わないとおそらく$0.01と書きやがるのでw ほぼ確実に税関と揉めます、PlaneWaveはUPS使いなので通関業務代行している羽田のUPS事務所から連絡があると思いますが、このやりとりは発送元からの価格の根拠資料が必要になりとても面倒なので、最初から適切な価格を発送者に記載してもらうのが良いです。
ヒントは関税定率法14条の18にあります。
PlaneWaveに事情を説明して送り状(Invoice)の価格記載をこちらで指定した金額にしてもらってください。メインボードであれば関税定率法14条の18の範囲ですむと思いますがモーター本体とかあるいは機体全部を返送して修理してもらうなど大掛かりな修理になる場合はさらに注意が必要です。ここで詳細は書けませんが再輸入免税申請やサポートとのやりとりのメールの写し、シリアル番号などのエビデンス書類が必要になるでしょう。
なお、2025-08-30現在、トランプ関税による混乱でアメリカ向けEMSは日本郵便での引き受けを停止していますので、修理品の発送は高くてもFedexやDHL,UPSなどの国際宅配業者を利用するしかない状況です。
往路
国際郵便(EMS)の場合でしたら日本郵便のサイトで追跡できます。

復路
UPSのサイトで追跡できます。

帰ってきたメインボード、リビジョンがBからCへ変わりシリアル番号も変わりました。

元通りに筐体に取り付けてあっさり認識されました、これで一安心。
モーターチューニングをやり直して、晴れた夜に再度モデリング(全天プレートソルブ)して完了しました。
続く> え?続くの?w
CT12主鏡の洗浄
開放型の反射望遠鏡で避けて通れないのがミラーの洗浄ですね、なのでみんな自分のやりやすい方法を見つけて実施してると思います。割と一般的な方法だと思いますが私の場合はこのようにやっています。
スライディングルーフに設置した望遠鏡はニュートン式のような開放型鏡筒ですと、チリ、ホコリ、落ち葉、クモの巣wなどいろいろな邪魔者が入ってきますので定期的な洗浄作業が欠かせません。ニュートン式の主鏡セルは引きネジを外してセルごと鏡筒から外すものが比較的多いと思いますが、CT12の場合は鏡筒後端側面の6本のキャップスクリューを外して光軸調整ネジに触らずに主鏡セルを取り外せるようになっています。
ホコリなら吹き飛ばせばいいじゃない、ということでエアーを吹きたくなるところですがこれはお勧めできません。砂粒のような硬いものがある場合はエアー圧で鏡面に細い髪の毛のようなキズがつく場合があります。黄砂のシーズンは特に怖いです。
これはε-180のミラーにエアーを吹いたらできたキズです。再メッキで修復できましたが、ガラスまで削ってしまってると再メッキでも直らないかもしれないと言われました。

さてCT12ですが、流石に30cmともなると結構重いので取り落とさないように慎重に外します。
今回もホコリが積もっていますが、これはまだ綺麗な方かもしれませんね。
床にはカラマツの落ち葉が風に乗って降って来てます、鏡筒の中にも入り込みます。

反射鏡のメッキは酸化シリコンのコーティングがされていますが、拭き掃除したりするとキズが付きますので擦らないように気をつけます。
まずはティッシュを数枚被せてその上から薄めた洗剤液をスプレーします。
ミラーをセルから外すと不慮の事故や光軸のズレが発生しやすいので付けたままです。

少し時間をおいて汚れを浮かしてから(擦らないように)濡れティッシュを取ります。
乾いたティッシュを静かに置いて余分な洗剤液を吸い取らせます。

次に精製水をスプレーし、またティッシュを置いて吸い取ります。2,3回やれば洗剤成分はなくなるでしょう。

大体OKですね。白い小さな粒が残りますが取ろうとして擦るとキズになりますのでやめておきます。

主鏡セルの向きを間違えなければ光軸ズレも発生しません。

CT12のフォーカサーをまた交換
ブログご無沙汰になってましたm(_ _)m
前回の記事から随分経ってしまいましたので機材も結構入れ替わっています。ネタはいろいろ溜まってしまいましたがぼちぼちと記事化していこうと思います。
英オライオン(OOUKと略称されることが多いようです)の30cmニュートン鏡筒CT12は現在も主力の一角です。温度順応に時間がかかるなどちょっと扱いにくいところはありますが30cmF4.0の集光力は伊達ではないと思っています。
前回は標準付属のクレイフォード式接眼部をラックピニオン式のものに交換したところまででしたが、ギアですのでバックラッシュがやや気になり、最終的にはフランジがリニアに移動するタイプのフォーカサーにしたいなと考えていました。
このタイプのフォーカサーはあまり選択肢はなくて、OPTEC Gemini がアマチュア向け汎用現行製品ではおそらく頂点でしょう。価格もですけど。

私自身も他の鏡筒に使っているイタリアのメーカーPrimaruceLabのESATTO 3.5" LP はOPTECよりはかなりお安いです。(それでも高いですねw)
PrimaruceLab純正パーツとしてニュートン鏡筒のアールに合わせたベース金具がありますが口径25cmまでで30cm用はありませんでした。

かつてはタカハシも販売していたβ-SGRはディスコンになって久しいですが、今でも愛用されている方は多いのではないかと思います。開口部がM76(青)とM98(黒)
の2種類があり、M76の方はε-180EDにセットとして販売されていたこともありました。

付属するソフトウェアでスケアリングの状態を可視化することもできたりしますがWindows版のみで、しかも11では動かないと思われます。(自分の環境では起動できない)

問い合わせ先にダイイチという会社名が書いてありますが、すでに天文関連事業から撤退していますので再販売やソフトウェアのアップデートは見込めません。
現在は ALCOS.EG Support に連絡することで修理などのサポートを受けることができます、ドライバーもWindows 11で問題なく使用できます、ASCOMドライバも同様です。

ハードウェア(リング状の本体、コントローラボックス、接続ケーブル)のみ入手した場合でも、必要なドライバファイルは現在も以下のリンクからダウンロードできますので問題はありません。
ここまでが前置きです(長いw)
私の場合は前述のε-180ED β-SGR仕様鏡筒を以前から使用して慣れていましたので、β-SGR中古品をオークションで入手し、CT12に元々付いているベース金具をそのまま利用できるように接続リングを設計しようと考えました。カーボン鏡筒に新しいネジ穴を開けるのが嫌だという理由です。
β-SGRはトラベル(摺動量)が5mmしかありませんので光路長の設計をミスるとピントが合わなくなりますので接続リングは慎重に考える必要があります。
例えばこんな感じです。
一般的なニュートン式ではコマ収差を低減する補正レンズ(コマコレクター)を使用しますが、メタルバック(補正レンズの金属枠のカメラ側端〜カメラセンサーまでの距離)があらかじめ決まっていますので、ピントが合うとともにメタルバックも合うように設計する必要があります。今回入手したβ-SGRは開口部M98の180FLという機種でしたが、M98規格の汎用接続リングは大きすぎて市場にはほぼ無いので、スターベース東京のホームページで検索して在庫のあるもの以外は製作してもらうことになります。β-SGRはタカハシ扱いだったため接続リングやシステムチャートはタカハシが提供していたので問い合わせれば今でもリングの在庫や情報の提供はしていただけます。
下図のφ80テーパー-M98Mアダプター、M48F-M98M-M54Mリングは特注しました。


使用しているコマコレクターは2インチスリーブに差し込むのが一般的な使い方ですが、カメラ側にM48オスネジが切ってありましたので、スリーブではなくアダプターに捩じ込んで支える方式にしました。スリーブに刺して使う場合はアイピースと同じように1本または3本の押しネジで締め付けることになりますが、落下しないように強く締め付けがちで星像がおにぎり型に変形した経験のある方もいらっしゃるでしょう、自分もそうでしたw


最後に、この構成で撮影して画像処理したものを掲載します。(APS-Cクロップなし)
M51
2025-04-25,26
EM-400 GT-40 auto guide ASI2600MM -20℃ Total 381min
L 180sec x 35
R 180sec x 17
G 180sec x 18
B 180sec x 19
Ha 180sec x 38

NGC1579 北の三裂星雲
2025-01-5,6,26
EM-400 GT-40 auto guide ASI2600MM -20℃ Total 228min
L 180sec x 24
R 180sec x 18
G 180sec x 17
B 180sec x 17

輝星の周りが見苦しいですね、主鏡押さえの爪をマスクしていないためだと思います。
英オライオン CT12が戦列に加わる
ブログ更新を半年も放置してしまいました。どうも機材をいじりだすとある程度結果が出るまで集中してしまい、同時進行で記事を書けない性分のようです。
さて、また機材の話になってしまいますが、当初は春のSkyWatcherセールでBKP300という元々異常に安いニュートン鏡筒がさらに値引きされていまして、ポチリヌス病が再発してしまったのがきっかけです。この鏡筒はすでにディスコンになっていますので最後のセールだったのでしょう。ただしF5でスチール製でしたから長くて重いです。ざっと図面を引いてもホームポジションでスライディングルーフ天井に衝突するのは確実です。なのでセール対象外ですがQuattro 300PというF4の鏡筒を載せようと決めました。もう買う気まんまんで代理店に納期とか問い合わせたのですが、ここでちょっと驚きの...
鏡筒と主鏡が別梱包でメーカー直送される!
という事実を知ってしまい悩むことに。
海外の運送業者は荷扱いが荒いというのは知っていましたので、接着されている斜鏡と違い、主鏡は圧迫に極めて弱いため軽く固定されているので30cm級では外れて破損してしまわないようにという配慮のようです。
完成品として組み立てられ検査されたかどうか不明なものを(いや多分検査しているのでしょうが)直送されても困るよなぁなどと考えたわけです。
そして重量です、Quattro 300Pはバンド込みで22.4kg、自分の体力では25kgを胸の高さまで上げるのが限界で、太い鏡筒ではちょっと取り落としそうで怖いというのが正直なところ。せっかく赤道儀を空けたのに振り出し? いやそれも悔しいですね。
そういえばカーボンのニュートン式もあったような、確か軽いはず、と調べてみたらありました。英オライオン(Orion Optics UK)という老舗メーカー。
このメーカーの特徴は
・20cm〜40cmのニュートン式鏡筒にいくつかシリーズがありカーボン鏡筒もある
・鏡面精度は一つ一つZygo干渉計で測定し、測定結果が添付される
・シリーズによって鏡面精度保証値が異なるが、概ね1/10λ程度と必要十分
当初の予算から少し(かなり?)外れてしまいますが、それほど非常識な価格ではないと思われるCT12を選択しました。とりあえず国内代理店のジズコさんに問い合わせたところ、CT12も海外輸送は鏡筒と主鏡が別梱包ですが、国内輸送なら主鏡を取り付けた状態で届けることが可能とのこと。また、主鏡取り付け、仮の光軸合わせ、国内輸送でのトラブル保証はジズコさんが負ってくださるという提案をいただけたので、前言を翻してCT12に決定したのでした。
OOUKの鏡筒による作例は国内では少ないと思いましたので海外の投稿サイトAstrobinで一応検索しましたが、光学製品はメーカーによっては品質にばらつきがあり、画像処理でどうとでもなるのであまり当てにはならないと個人的には思っていますので参考程度です。
スペックは以下の通り。
CT12
口径300mm F4 焦点距離1,200mm
主鏡 放物面鏡: 波面誤差値1/10PV以内保証、Hiluxコーティング 斜鏡短径 75mm* オフセット取り付け
接眼部 デュアルスピードフォーカサー
鏡筒サイズ・重量 鏡筒外径約350mm 、鏡筒長 約1,100mm、鏡筒重量 約17Kg
(切削バンド装着時は+2kg)
鏡筒バンドは上等なものが標準付属してますがアリガタレールは別売です。
私の場合は連装用のアルミプレートに鏡筒バンドをねじ止めしますので必要ありませんでした。
純ニュートン式ですからコマコレクターは必須です。
定評があって入手しやすいのはこれらのようです。
Baader 2" MPCC
Sky-Watcher F4コマコレクター(GSO社のOEMと思われます)
Tele Vue 2" パラコア
パラコアは接眼レンズの視野絞り位置に合わせてバックフォーカスを調整できるようになっていますが、私は写真撮影専用で良いので価格的に手頃感のあるSky-Watcher F4コマコレクターにしました。EDレンズ含む4枚玉でAstrobinでも使用している人が多いようです。
今は画像処理でコマ収差を補正できてしまうので、それが前提ならあえて高級な物でなくても構わないと思います。
そんな経緯を経て2023-05-12に発注し、納品されたのは2023-10-17と予想以上に時間がかかりました。たしかジズコさんのサイトでは3~4か月と記載されていたかと。
まず開封状態です。またしても巨大な箱。

添付されていた鏡面精度測定結果です。
波長632.8nmのレーザーでPV64.77nmの波面誤差ということでほぼほぼ1/10λと言えそうです。(PVはPeak to Valley、設計値からの誤差の山から谷までという意味です)
穴が空いているように見えますが斜鏡の影になるので測定対象外であり、実際に穴が空いてはいませんw

光軸はというと、めちゃくちゃではないですね、少し安心。レーザーコリメーターだけでは参考にしかなりませんが、おいおい追い込んでいくとしましょう。

赤道儀に載せてみます、天井に付きそうですね。
鏡筒バンドのネジ穴に合わせてアルミプレートにボール盤で穴あけし、キャップスクリューで固定しました。
カウンターウェイトはわかる人はわかりますが搭載重量オーバーですw

反対側から見るとこんな感じ。黒い背景みたいですね、圧迫感がすごい。
同架の場合は同じ対象を同時に撮ることが多いですが、プレートの穴あけやアリガタの精度は元々良くないため500mmくらいでも写野が結構ズレてしまいます。
そのためFSQの下にAltAzプレートとか呼ばれる上下左右を微調整できる機構を挟んでいます。

これがそれなのですが、メーカーとか一切不明です、ヤフオクで入手しました。
上面は見たことのないねじ穴配置で既製のアリガタは付かないため、35mm間隔のねじ穴に変換するアルミプレートを自作しました。

中に入ると全体が写らないので外からも1枚。入ってくんな!と言わんばかりの威圧感w

さて、ここでトラブルを白状します。
接眼部が何故に2つ?
下が元のクレイフォード式接眼部です。右側に並んでいるのが鏡筒に接するベース金具です。

接眼部の根元がテーパーになってまして、ベース金具の縁にある小さな穴の奥のイモねじ4本で固定されていました。で、ちょっとした手違いで鏡筒を滑り落としそうになり慌てて接眼部を掴んだら、ポロッと外れて接眼部だけコンクリートに落下!
やっちまった!
やっちまったことはしょうがない、鏡筒を落とさなかったのが不幸中の幸い、ましてや怪我もしていない、いやそもそもクレイフォード式は自分と相性が悪いので、これはラックピニオン式に交換せよという何かの啓示なのでは?と即座に理解w
そういうわけで海外サイトを徘徊し、双子のようなラックピニオン式接眼部を奇跡的に見つけてしまいました。よく見るとベースが違いますね、でも厚みとテーパーが入る穴径は同じなのです。つまりカーボン鏡筒に新たに穴を開けずに済んだわけです。災い転じて福となす、違う、転んでもタダ起きない、かなw
落としたクレイフォード式は摺動筒を押さえるベアリング支持棒が折れていてスムーズな出し入れができなくなっていました。修理を試みましたが微妙な摩擦で成り立つクレイフォードは元には戻りません。

この新しい接眼部も手動ですから、リモートで使うにはモーターが必要です。定番のZWO EAFを取り付けます。できればβ-SGRやPrimaluce Labのようなフランジ型フォカサーにしたかったのですが、この鏡筒にフィットしそうな物はなくて断念、イタリアにもメールで交渉したんですがベース金具は25cm用までとのこと。
取り付けは専用ブラケットは存在しないのでFSQ用ブラケットと3Dプリンタでよく使われているパーツを適当に組み合わせてサクッと出来上がり。
ブラケットのねじ穴が長穴ですのでベルトテンションも簡単に調節できます。

あとは赤道儀のバランスをとって準備完了です、簡単でしょ、ね。
ファーストライトは何度も挑戦しては敗退している馬頭星雲にしました。
光軸調整を厳密に行う前ですが、斜鏡は少しいじりました。
アルニタクの眩しさでゴーストが発生したり、なにかとうまくいかない対象ですが、今回はなんとか画像処理できるものが撮影できたと思います。
よく見ると光条の先が割れていたり、ハロが均一になっていないなど確認ポイントがありそうですね。これらは主鏡マスクや斜鏡マスクで改善(ごまかし)できそうな気がしてます。

いかがでしたでしょうか、感想やアドバイスなどいただけたら嬉しいです。
また鏡筒が来るよ、のための準備
L-500、せっかくバランス取れたのに載せ替え
ようやく機材が落ち着いたかと思いきや、また鏡筒をポチってしまい(5月のこと)、納期は2〜3ヶ月ということでしたので、もういつ来てもおかしくない時期に。
さて、どうしたものかと。...無計画ですな。
16インチRCとε-180EDをL-500に載せてどうにかバランスを取ったのですが、もう一台の赤道儀EM-400にはすでにCCA-250とFSQ-106EDPが載っています。
マッチプレート(アルミ板に穴を開けただけですが10kgもある)に並列同架して推定重量41kg!すでに最大搭載重量をオーバーしてますね。
さらに20kg近く追加したらどうなるのでしょう?
ツイッターのフォロワー様からは極軸を支えている爪が折れるよ、とのお告げが、怖い。いやすでに怖い。
各部をちまちま肉抜きしてもたかが知れてるし。
ということで結構悩んだ末に選んだのはL-500にもう一本載せられないだろうか? です(笑)
お気づきかも知れませんが、旋回中にバランシングアクセサリーがチラッと見えます。下のこれです。
標準付属の3個のウェイトにEQ6R用の5kgを2個追加しています。
トータルで19kgくらいだと思います。もしかしたら、これを外して代わりに鏡筒をこっち側に取り付ければバランス取れるかも。ドイツ式と違いフォーク式はカウンターウェイトは基本いらない方式なんだし。

16インチRC + ε-180ED + CCA-250を単純に足すと80kgくらいと思われます。
この赤道儀の最大搭載重量は91kgですので可能性としてはありですよね。
となればやってみるしかないです。
DEC(赤緯)のバランスはアリガタ・アリミゾで固定している鏡筒を前後にスライドするだけですので簡単です。手順は簡単という意味で、実際やるのは重労働です。
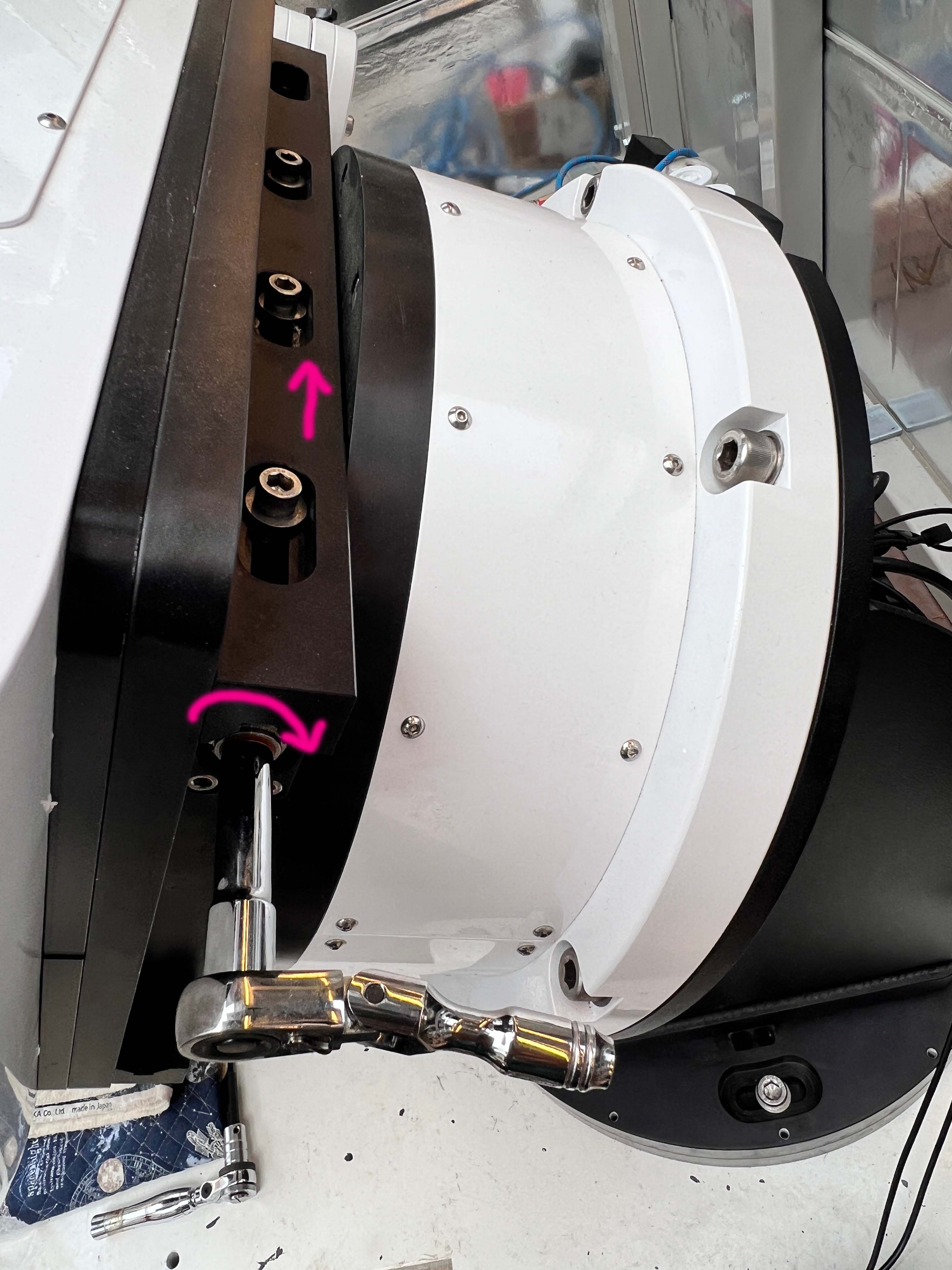
RA(赤経)のバランス取りは2つ方法が用意されています。
①フォークアーム底部のスライド機構をレンチで調整してずらす。
②ベースモーターとフォークアームの接続ポイントをずらす。
緑色のラインがベースモーターとフォークアームの接合面です。
①の方法
こちらの調整は両脇に見えるボルトを緩めて、写真のようにソケットレンチで南北に重心を移動します。長穴の範囲内でしか移動できませんので微調整用という感じです。

②の方法
下の写真は北側から見たものです。
ベースモーターの上には黒い四角いベースプレートがあり、8個の長穴と6個のボルト位置の組み合わせで南北に偏心させることで、大きく重心を変えることができます。
ケーブルを通す穴はずらしても剪断されないようにでかい長穴になってますね。
最初の設置時に、どの穴を使うかを判断する支援ツールとしてExcelシートがダウンロードできますが、L350用しか見つけられなかったので私は勘でやりました(笑)
ちなみに2本の飛び出ているボルトはショルダーボルトと言って、フォークアームを載せるときにアームの底の穴に引っ掛けるためのものです。赤道儀ウェッジの場合はこの黒いプレートが手前に55°くらい傾いていますので、持ち上げながらネジ穴を探すという地獄から解放してくれるありがたい存在です。

①の方法は全部載せたまま行えますので、とても楽です。
②の方法は上に何か載っているとできませんので、鏡筒とフォークアームを一旦下ろすしかありません、これは大変な作業です。
上の写真はマニュアルから引用したのですが、極軸高度調整が2本の六角ボルトになってますね。自分のは下の写真のように歯車のようなナットがついてます。改良されたのかもしれません。

今回は、16インチRC、ε-180ED、CCA-250の3本を載せるチャレンジですが、②は極力やりたくないのは明らかですね。なので②は現状のまま変更せず、①だけで済ませたい、マジで。
鏡筒の配置は、内側中心に一番重い16インチRCを載せ、RCの外側にε-180EDを、フォークの外側にCCA-250を載せることにしました。なんとなくバランスが取れそうな気がしたというふわっとした判断です。
やってみました。
電源を入れて北東へ向けた状態です。バランシングアクセサリーを外しましたので、ウェイトが床に当たって今までは向けられなかった方向へ、今回は向けられるようになりました。
バランスはDisconnectしてフリーにして手でクルクル回した感じでは良さげです。今のところ①の微調整だけで済んでいます。これはいけるかも!
六角レンチを鏡筒に落としやすいので段ボールをドーナツ型に切ってミラーをカバーしています。

ちゃんとバランスが取れているかは、モーターチューニング(Auto Tunerコマンド)をやってから、日中でもいいので色々な方向へ向けて恒星時駆動し、変な振動が起きないか確認します。RMSが0.2"以内であれば問題なしですが。
左下の緑色の数値の上がRA、下がDECです。
北極付近のやや南、問題無し。

北極付近の西の方、RAがやや悪いです、

北極付近の東側、これもRAがやや悪いです。

天頂は問題ないようです。

西方向、問題無し。

東方向、RAがやや悪いです。

南の赤道付近、問題無し。

西の赤道付近、問題無し。

東の赤道付近、RAがやや悪いです。

南の低空、DEC,RAともにちょっと悪いですね。

西の低空、問題ないです。

東の低空、RAがやや悪いですね、

う〜ん、どう評価したらよいものか?
極付近と低空は手で動かしても抵抗があるので、モータートルク不足かもしれません。
DECはバランスが取れているようです。
RAは東へ向けると数値が悪くなるのはよくわかりませんが、搭載重量オーバーなのかも知れません。80kg/91kgなのですが、おそらく91kgというのは単筒の場合じゃないかと。今回は極軸から離れた位置に2本鏡筒を載せてますのでモーメントが大きくなっていると思います。
RMS 0.4"は実際の星像にどの程度影響を及ぼすのでしょうか?
以前、鏡筒とカメラの組み合わせごとに1画素の秒角を計算してみたので掲載します。
1画素あたりの画角(arcsec/pixel) = 画素サイズ (μm) * 206.265 / 焦点距離 (mm)
鏡筒,焦点距離,カメラ,センサーサイズ,縦画素数x横画素数,画素サイズ,画角
ε-180ED, 500mm,ASI2600MM, 23.4x16.7mm, 6248x4176, 3.76μm, 1.55"
CCA-250, 890mm, ASI6200MM, 36x24mm, 9576x6388, 3.76μm, 0.87"
GSO16A, 2600mm, STL-11000M, 36x24mm, 4008x2672, 7.6μm, 0.60"
実際の最微恒星は上記値に光学系の収差と気流による乱れ1.6"程度が加算された像になるようです。
ε-180ED, 500mm,ASI2600MM, 23.4x16.7mm, 6248x4176, 3.76μm, 1.55"
CCA-250, 890mm, ASI6200MM, 36x24mm, 9576x6388, 3.76μm, 0.87"
GSO16A, 2600mm, STL-11000M, 36x24mm, 4008x2672, 7.6μm, 0.60"
実際の最微恒星は上記値に光学系の収差と気流による乱れ1.6"程度が加算された像になるようです。
右端の画角(単位は秒角)がセンサーの1画素分の画角です。
この範囲の誤差であれば1画素内に収まってしまうので許容誤差ということになります。
これから判断すると、3本の鏡筒についてはRMS 0.4"は問題なさそうです。
ちなみにEM-400でPHD2でオートガイドした場合、平均RMSは0.5"くらいが多いです。
ケーブル1本追加しただけでバランスが変わるので、今はとりあえず良いということにして、微調整しながら追い込んでいきたいと思います。
またしても、天体写真が一枚もない記事を書いてしまいました。
※ 2023-11-26 追記
GSO16AのカメラをSBIG STL-11000M(水冷)に、外したASI6200MMをCCA-250に替えました。これによって総重量が増えたためか、Planewaveの制御ソフトのAuto Tuner(ペイロード測定)、モデリング(全天一括プレートソルブ)が途中で終了してしまうという問題が発生しています。
このままでも自動追尾については問題なし、自動導入は若干ズレますが画面内には対象が入っているので手動で微調整することで運用で回避しています。
バランスは取れていますので、過積載(慣性モーメントに対するモータートルク不足)だと推定しています(^_^;)また、ε-180EDをフォークのアウトサイドからインサイドに移したため、バランシングアクセサリーが不要となり、これまで北東低空に向けた時にウェイトが床に衝突してしまうという問題は解消しました。
※ 2024-01-24 追記
同架しているε-180EDのカメラ(ASI2600MM)でオイルリークが発生したため修理に出し、その分東側が軽くなったのでバランスを取り直し(修理中ですが他の鏡筒では撮影したいので)、ダメ元でモデリング動作を行ったところ、なんと完走してしまい、写野ど真ん中に対象を自動導入できるようになりました。つまりカメラ1台分の重量オーバーだったということですね。

PlaneWave L-500導入 - 計画から設置・調整まで -

はじめに
前回はリモート観測所を建設するまでの流れを、これからやってみようかという方向けにざっくりと一通り説明してみました。いかがでしたでしょうか?
観測所の運用も半年ほど経ち、機材も安定してきましたので、あまりほかのブログでは触れられていない情報として、PlaneWave社の赤道儀について取り上げてみたいと思います。
PlaneWave社の赤道儀はまだ国内の利用実績が比較的少なく、特にLシリーズは魅力的なスペックを持ちながら、導入検討した2022年夏の時点では参考になるブログも見当たりませんでした。また、国内正規代理店が見つかりませんでしたので、海外販売店を手がかりに情報収集してきたのは前回の記事の通りです。実際に導入するといろいろ想定内・想定外なことなどありましたので、これから導入を考えている方に参考になるようまとめてみたいと思います。
とある天文月刊誌にてPlaneWave社製品を天文ハウスTOMITA様が正規代理店として取り扱うというアナウンス(広告)がありましたので、この機会に当記事を書いておこうと思い立った次第ですが、機材の性能を客観的に評価できるほどのスキルは残念ながら持ち合わせていませんので、基本的に導入前の注意点や気がついたこと、個人での設置方法などが中心になりますことご了承ください。
PlaneWave赤道儀は重量のある据付タイプの赤道儀です、したがって本来は国内販売店にコンサル・見積もり・設置・保守を依頼するのが安心安全ですが、PlaneWave社のサイトからかなり詳細なインストレーションガイドがダウンロードできますので、ポータブル赤道儀(据付け型ではない、三脚などに乗せられる普通の赤道儀の意味です)を普段使いされている方には、据えつけ方を読んで理解することは難しくはありません。
ですが、一人で抱えられる重量ではありませんので事前に検討・準備しておくことがありますので、それらを自分で解決したいという方には当記事が参考になればいいな思います。
天文ハウスTOMITA様も設置に伴う付帯サービスとセットでの販売をを考えていらっしゃるようですが、自分で設置したい方は製品のみの購入も可能にする方向で検討するとお聞きしています。
そこで自分で設置するにはどんなハードルがあるのかをご理解していただき、これは無理かも? めんどくさ過ぎる、と思われるか、これならやってみよう、と思われるかの判断は人それぞれだと思います。が、いずれにしろ後述のドキュメントを合わせてお読みいただければ設置サービスを利用するかどうかの判断材料になると思います。
まず、発注以前に次のことを考えておきます。販売店に相談する場合でも事前に要件を整理しておいた方が良いと思いますし、バランシングなど(PlaneWave赤道儀はバランスが重要です)ご自分で調整するスキルは後々必要になリます。
次の流れで説明していきます。
・観測所内での配置(ドームの場合は問題は少ないです)
・搭載する鏡筒の重量とバランス
・赤道儀の脚(ピラーなど)の用意
・赤道儀の搬入方法
・赤道儀の組み立て方法
資料として、PlaneWave社のサイトにあるインストレーションガイドを読みましょう。
これらの英文PDFファイルはテキスト部分は選択コピーできますのでDeepLなどで翻訳すれば言語の問題はありません。pierが桟橋などと翻訳されてしまいますがわかりますよね(笑)
L-350 Mechanical Installation Guide | PlaneWave Instruments
L-500 & L-600 Mount Mechanical Installation Guide | PlaneWave Instruments
ポイントとしては、観測所内にちゃんと収まるのか? 鏡筒を搭載して壁とか隣の望遠鏡に当たらないか? 低空の対象に向けられるか? を確認します。
これは手書きでもいいので図面を引いてシミュレーションするしかありません。
Lシリーズ赤道儀は電源投入のたびにホーミング動作が必要で、その際、『勝手に天の北極方向を向くのでスイングスルーに注意』と以前書いたと思いますが、その際見落としがちなのが鏡筒のバックフォーカスです。つまりカメラまで含めた鏡筒の長さです。
鏡筒の長さを確認する
RC鏡筒にフラットナーを使用した場合とレデューサー・フラットナーを使用した場合のリング類の組み合わせ(システムチャート)を図面にしました。補正レンズを使用する場合、メタルバック(補正レンズからカメラセンサーまでの距離)が指定されていますが、フィルターホイールやオフアキを入れても問題ないか確認したかったので、そのついでにカメラを含む鏡筒の長さを算出しました。
ただし、ケーブルコネクタの出っ張りや、赤緯バランスの都合で鏡筒を前後させる必要も出てきますので余裕を持たせた方がいいです。

上図のシステムチャートから鏡筒の長さが大体決まりました。
鏡筒のアリガタをスライドすることで赤緯のバランスをとりますので、カメラを取り付けた状態での重心位置を知る必要があります。手元に鏡筒があるならばインストレーションガイドに書いてあるように、アリガタの下に丸棒を直角に置いてシーソーのようにバランスが合うところが重心となります。この重心位置は後でまた使いますのでマーキングしておきます。この鏡筒ではカメラ後端から648mmのあたりになりました。フォーク式はアームが長いと剛性が下がるため、このようなボトムヘビーな鏡筒が向いています。
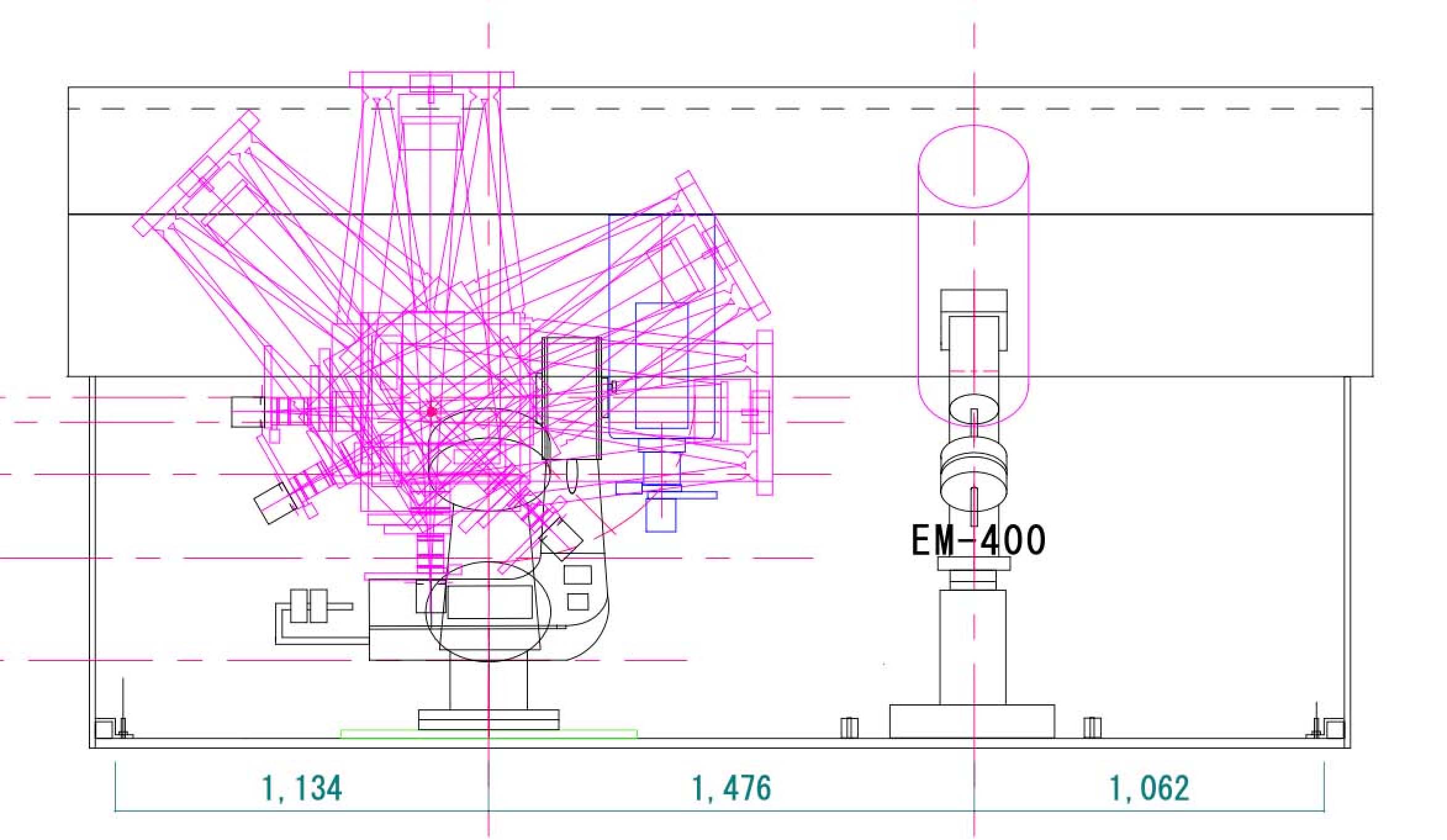
次にスライディングルーフに収まるかどうかの確認です。
西の方向から見た図です。(左が北になります)
北と南の壁には衝突しませんが、ルーフに衝突することがわかります。
天の北極に向けた時にカメラがマウントに衝突することはなさそうです。これを「スイングスルー」と表現しています。
南の低空は、この図には記載していませんがCAD上で計測すると高度21°以下の対象は撮影できないことがわかります。(このスライディグルーフは南側の壁の一部が可倒式になっています)

次に北側から南を見てみます。
東西の壁はカマボコ型で固定なのでどうしても死角が多くなります。
隣の赤道儀がドイツ式ですので、子午線を超えているときに(メリディアン化EM-400なので)、左の鏡筒の筒先と右のカウンターウェイト先端が衝突する可能性がありそうですね。
上から見た図です。
赤道儀ウェッジとの組み合わせでは南北方向のスペースが余分に必要になります。
つまり経緯台として使用する場合はもっとコンパクトになります。
2.4m X 3.8mのこのスライディングルーフだとL-500+ウェッジはギリギリセーフという感じです。
栃木県でこれですから低緯度の地域ではもっと短い鏡筒でないと壁に当たるかもしれません。今回搭載した鏡筒はGSO社の16インチRCですが、PlaneWave社のCDKシリーズやAG Optical社のiDKシリーズ、UK ORION社のODKシリーズなどは鏡筒が比較的短いのでスペース的にはもっと余裕が出ると思われます。逆に屈折鏡筒のようにトップヘビーなタイプはフォークアームのアウトサイドに搭載することになるでしょう。

赤道儀ウェッジは緯度に合わせていくつかのパターンがありますので設置場所に合わせて選びます。


搭載重量も計算してみましょう。
Lシリーズの最大搭載重量は、
L-350 45kg (自重50kg、スイングスルー22.5インチ)
L-500 91kg (自重100kg、スイングスルー25.62インチ)
L-550 ? 新製品でまだ仕様未開示
※ 追記 2023-11-26
L-550はL-600のモーターをL-500の筐体に収めたもののようです。
最大搭載重量はL-600と同じ136kgとなっていました。
私のようにアウトサイドにも鏡筒を載せる欲張りにはこちらが向いていそうです。
L-600 136kg (自重153kg、スイングスルー35.1インチ)
となっていますが、ドイツ式と異なりカウンターウェイトも含みます。(Lシリーズはバランシングアクセサリーとしてマウントや鏡筒に設置するオプションウェイトが用意されています)
私の場合は、L-500でGSO16AとCCA-250の並列同架を目論んだため以下のようになりました。
GSO16A + カメラ等 36kg
CCA-250 + カメラ等 27kg
FC-76DS 3kg
ワイドサドル(インナーサイドのアリミゾ) 5kgくらい?
Kellerサドル(アウトサイドのアリミゾ) 1kgくらい?
バランシングアクセサリー + 追加ウェイト 19kgくらい?
合計で91kg ピッタリかなー?
当初は追加ウェイト(10kg分)はありませんでしたが、アウトサイドのCCA-250が重過ぎるため追加しないと赤経バランスが取れなかったのです。
純正のバランシングアクセサリーです(2,5,10ポンドのステンレスウェイト付き)

シミュレーション結果の検討
このようなシミュレーションをしてみると、全天どこにでも向けられて、他の望遠鏡とも干渉しないというケースはドームくらいではないかと思います。その場合、どの制約が許容できるか/できないかを妥協するしかありません。
例えば、鏡筒のホームポジションを西向き水平にし、不動点をもっと上げることによってもっと南天低空の対象を狙えるようにするとか、逆に不動点を下げて雨滴センサーでルーフ自動閉しても衝突しないようにするとかですね。
この検討結果によって配置と脚(ピラー等)の高さを決定します。
私の場合は、不動点を限界まで低く、限界まで南になるようにして、雨滴センサーによるルーフ自動閉を一旦諦めます。将来的には赤道儀の制御ソフトを外部からコントロールし、ホームポジションに格納してからルーフを自動閉する仕組みを考えたいと思っています。この赤道儀の制御ソフトはPythonスクリプトでコントロールできるそうですが、今のところライブラリ情報など必要な情報が入手できていません。
ホームポジションの位置は自由に設定できますので、ルーフの動きと連動できるようになったらウェッジの下に置くハーフピラーを作るかもしれません。
脚(ピラー)の設計
赤道儀ウェッジの底面は以下のように6本のスクリューで床またはピラーの上面に固定する仕様です。単位がインチであることに注意してください。
下図はL-500用ウェッジのピラーインターフェースです。

不動点が低い方がいいとはいうものの、コンクリート床に直に赤道儀を置くことは普通はできません。アンカーネジ穴をコンクリート床に1mmのズレもなく建設業者に設置してもらうのは困難ですし、後付けのアンカー(グリップアンカーとか)をズレなしで設置するのも無理です。1mmでもズレたらダメなのです。またコンクリート床も完全に水平平面ではありません。
一方で、鉄材の加工は公差を非常に小さくすることが可能です。そこで私の場合は厚さ25mmの鉄板(黒皮鋼板)を脚ベースとして鉄工所に依頼しました。
下記の図面は鉄工所に送付した図面ですが、6本のボルト位置をインチからミリに変換しています。厳密には15.75インチは400.05mmですが、そんな公差は保証できないと言われそうなので400mmとしました。0.05mmの誤差なら特に問題ありません。
床面に固定するためのキリ穴はφ40mmもの大穴を10箇所に開けていますが、t10mmの鉄板でφ80mmの特製ワッシャを作ってもらい、アンカーのズレを吸収することとしました。
他に4箇所吊り下げ用のアイボルトを捩じ込むタップ穴を開けてもらってます。M8で注文してしまいましたが、現物を見て小さ過ぎると考え直してM12を自分で開け直しています。t25mmスチールにM12のハンドタップはもう人力の限界です(笑)


PlaneWave赤道儀と鏡筒との接続はアリミゾ・アリガタ(マニュアルにはそれぞれSadle,Dovtailと記載されています)方式ですが、L-500のインナーサイドはPlaneWave独自の大型アリミゾが標準です、発注時にロスマンディタイプを指定することもできるそうです。L-350のインナーサイドはロスマンディタイプです、アウトサイドに別の鏡筒を同架する場合はL-350,L-500ともにロスマンディタイプのアリガタをオプションで取り付け可能です。Keller EZ Sadleというロスマンディアリガタでしたら取り付け穴位置不適合の心配もないのでお勧めします。
右がPlaneWave独自の大型アリガタ、左がロスマンディ規格のKeller EZ Sadleです。
ちなみに左の鏡筒は当初CCA-250でしたが、現在はε-180EDを載せています。
※ 追記 2025-08-29
現在はフォークアームアウトサイド(左)にCCA-250(25cm)を、インサイド(右)にGSO16A(40m)とGSRC12C(30cm)を搭載しています。総重量はほぼ90kgで搭載限界に近いです。後述のバランシングアクセサリーは不要となりました。

PlaneWaveのCDKシリーズ鏡筒であれば、この大型アリガタ仕様ですのでそのまま取り付けられますが、他社の鏡筒ではアリガタを製作する必要があります。
以下の図面を作成してアルミ材で特注しましたが、意外に重くてできれば適度に肉抜き加工をした方が良いと思います。
また鏡筒によっては、このアリガタを鏡筒に取り付けるプレートも別途製作する必要があるかもしれません。私の場合は鏡筒のチューンナップを依頼した田中光化学さんに製作依頼しました。ですので下図のキリ穴やザグリ穴はその特注プレートの仕様にマッチするように設計されています。

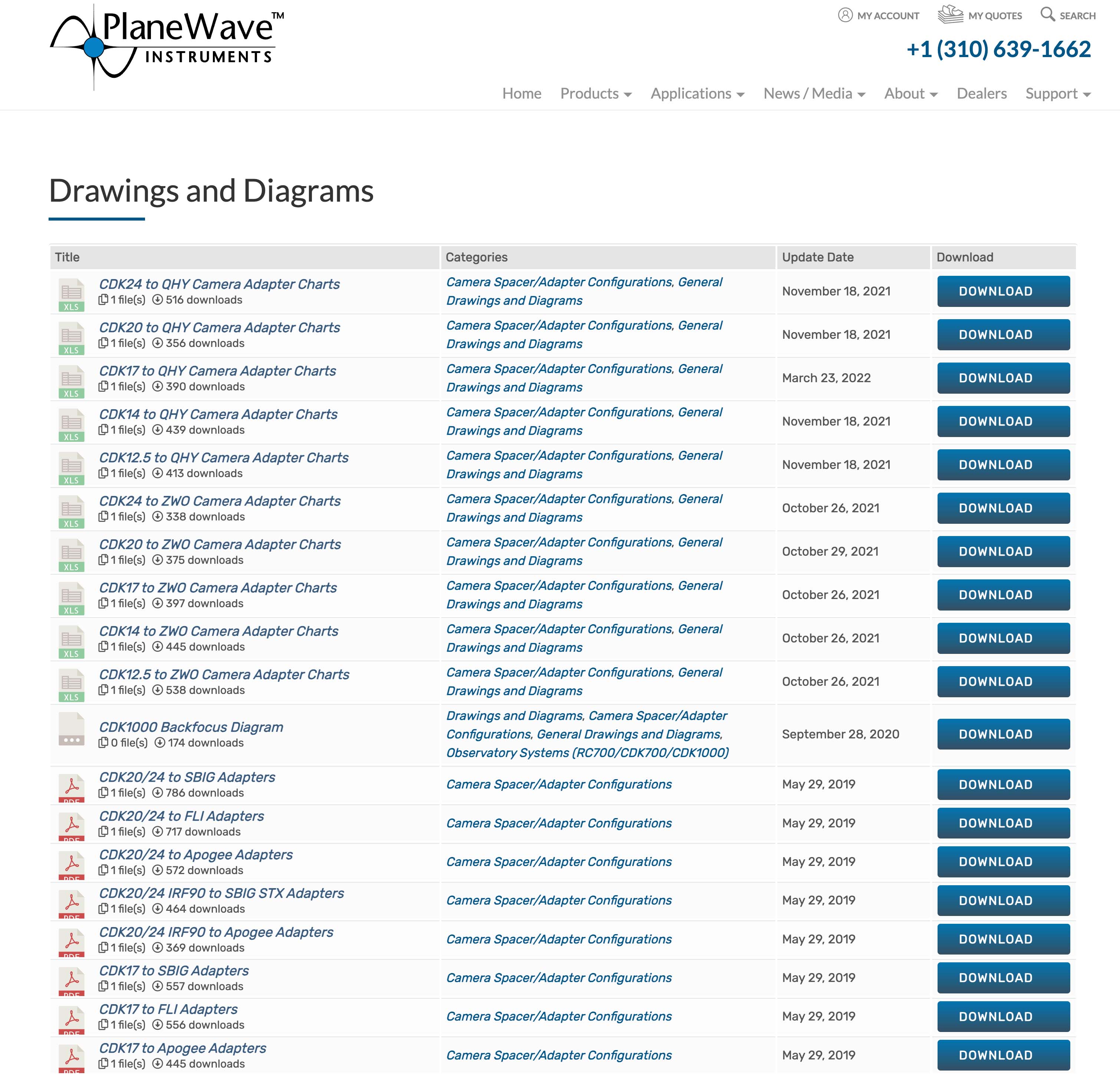
赤道儀や赤道儀ウェッジ、アリガタなどの仕様はPlaneWave社のサイトからダウンロードできますので、それをベースに作図しています。
Drawings and Diagrams | PlaneWave Instruments
どうでしょうか?ここまでが事前検討でした。
L-500について書きましたが、L350,L-600も基本的には同様です。
私のL-500赤道儀は2022-08-03に発注し、2022-12-28に納品されました。
半導体不足のため予想より日数がかかりました。時期によっては在庫ありの時もあります。アメリカのOPTとWoodland Hillsに相談し、対応の良いWoodland Hillsに発注しました。(その後OPTは閉店し、Agena Astroへ移管したとのことです)
鉄板とアリガタ製作の費用も掲載しますので参考にしてください。材料価格は流動的なので時期によって大きく変わる可能性があります。
脚としての鉄板

アルミの大型アリガタ

さて、いよいよ納品です。
一度に全部来ても大変なので、赤道儀が来る前に脚(私は鉄板(^_^;)、アリガタ、鏡筒チューンナップを済ませておきました。
人手が確保できるのでしたら問題はありませんが、重量物ですので移動するためには動線の確保とツールがあれば、より安全です。
私の場合は、単管の在庫がたくさんありましたので吊り下げモノレール方式で搬入しています。
鉄板の搬入と塗装とか
鉄板は127kgもあります。このような重量物は運送会社の営業所渡しが普通です。
到着予定日に軽トラを借りておき、営業所から連絡が来ますので受け取りに行きます。
営業所では木製パレットに載った状態で到着しており、フォークリフトで荷台に積んでもらえます。
動線としては、駐車場→1.5m上げて敷地内へ→10mほど水平移動→2.5m上げてスライディングルーフ入口へ→2mほど水平移動して設置位置へ
準備さえ怠らなければ一人で十分できます。
手で運ぶとなると大人4人でもキツそうです。
以下の写真でイメージが掴めるかと。
一人だと荷がぶら〜んとなってトラックの荷台や観測所の壁などにぶつけがちですので慎重にやりましょう。
観測所にユニック車が横付けできれば、こんな面倒なことは一切必要ありません。





1.5〜3mの上げ下ろしはチェーンブロック

1.5m以下ならレバーホイストが便利

水平移動はパイプトロリー(250kgまでOK)

鉄部ラッカースプレーで塗装しました。

よく晴れた日に南中時刻を確認して、下げ振りを使って正確な南北線の墨出しをします。

グリップアンカーを打ち込みます。
M12用なのでハンマードリルでφ18mm,深さ50mmのアンカー穴を開けて、グリップアンカーを打ち込みます。底に着くと広がって抜けなくなる仕組みですので、やり直しはできません。鉄板のベースにはφ40mmの穴が開いてますので、位置決めしてから穿孔できますし、多少ズレても問題ありません。
(コンクリートの穿孔は骨材という硬い砕石に当たるとズレますので、手作業では誤差1mm以下の精密な穿孔は無理だと思った方がいいです)
コンクリートにφ18mm穿孔は振動ドリルでは力不足でできません、モーターが焼けます。(焼きましたw)

脚の準備ができたところです。

赤道儀の納品
運送会社によって対応が異なるかもしれませんが、最寄りの営業所に着くと着荷の連絡がきます。赤道儀も重量物ですので営業所渡し、または車上渡しになると思います。
ゲート車で行きますか?どうします?と聞かれたのでゲート車をお願いしました。
車上渡しでは受け取り側が事業者の場合、フォークを用意していることが多いため普通のトラックにパレット積みで来ますが、私の場合は地面に降ろしてくれないと受け取れませんのでそれでは困ってしまいます。L-350でも木箱が重いので大人2名でも不可能だと思います。
ゲート車はこのように荷台の後ろにパワーゲートという上下する台がついたトラックです。今回はビシャモン(構内で乗って遊ぶヤツ (๑˃̵ᴗ˂̵)も持ってきてくれたので、駐車場まで入れてもらいました。

合板の木箱の中に分厚い鉄板で固定されています。どうりで重いはずですね。
木箱はその場でバラバラに分解しますが、赤道儀は完成形のままではとても重いので、アーム部分とベースモーター部分を分解してから運びます。
ウェッジはもう一つの木箱に入っています。
合計3つの機材パーツになりますが、どれも一人で運べる重さではありません。
L-500なら二人は必要でしょう。
鉄板搬入時のようにツールを駆使すれば一人でもルーフ内に搬入できますが、機材価格が2桁違いますので念のため応援を呼びました(笑)

ベースモーター部分、アーム部分、各鏡筒の取り付けを行います。
単管とレバーホイストがあれば一人でも作業できます。
アリガタの重心マーキングとアリミゾの中心を合わせれば赤緯バランスが合うはずです。

鏡筒が1本のときはまだ赤経バランスが取れていませんのでこのようになります。
クランプはありませんので勝手にクルクル回ってしまいますので注意しましょう。
(簡易クランプという名のネジとゴムが付いてきますが役に立ちません)

アウトサイドにCCA-250を取り付けた状態です。
北側に水平に向けても壁にはぶつからないですね。ギリですが。
(GSO16Aが骨っぽいですが主鏡周りのメタルカバーはチューンナップ時に捨てました、シュラウドとプラ段で迷光防止してます)

この赤道儀はマニュアルにもあるようにバランスが非常に重要です。
電源オフで赤経赤緯ともフリー状態になってますが、軽く触っただけでクルクル回ります。微妙なバランスを取る必要があるため、バランシングアクセサリーを使用すると調整がとても楽になりますが、狭いスライディングルーフですから振り回す範囲にも限度があります。鏡筒のシミュレーションはしましたがバランシングアクセサリーまでは思いが至らず、写真のように衝突ギリギリです。(わざと限界を狙ったわけではないです)

スイングスルーはこの程度の余裕があった方が良さそうな気がします。
想定外だったのは、不動点を限界まで低くしたためにバランシングアクセサリーが床に当たってしまう向きができてしまいました。北東低空に向けた時に当たります。
北東は高木で空が遮られていますのでどのみち実害はないのですが、後述するモーター自動調整を走らせたときに当たってしまい中断してしまいます。デフォルト値を変えればモーター自動調整は可能でしたのでこのまま運用することにしました。
なお、この赤道儀はダイレクトドライブのため減速ギアが無く、仮に障害物に当たっても機械的に損傷したりすることはありません。

お気づきかもしれませんが、バランシングアクセサリー標準添付のウェイト以外にSkyWatcher EQ6R用のウェイト(5kg)を2個くっつけてます。黒いL字型の部分にはいくつかタップ穴が開いていました(全部インチねじ)ので、専用のステンレスシャフトを製作しました。

赤緯方向のバランス調整は、鏡筒を前後させたり、鏡筒の先端や主鏡セル後部のバックプレートにウェイトを追加することで調整します。
赤経方向のバランス調整は、アームをベースに取り付ける際にオフセットさせることで疎調整し、下の写真のようにアーム下部のキャップスクリューを緩めてから、今レンチが刺さっている部分の六角ヘッドで微調整します。
それらで調整できないケースではバランシングアクセサリーを使用することになるでしょうが、搭載重量を消費します。基本的にアウトサイドに重い鏡筒を同架しなければバランシングアクセサリーは不要です。
そんなこんなで組み立てまで一応終わりました。
長いですね、この記事(笑)
次は極軸合わせです。
極軸合わせ中の写真を撮るのを失念してました、PlaneWaveのソフトウェアにも支援ツールがあったかと思いますが、一般的なドリフト法で合わせてます。
支援ツールを使った場合はプレートソルブを行なって、例えば方位ボルトを7.7回転回せ、という感じで指示が出るようです。
方位は6本のキャップスクリュー(今3本見えてます)を緩め、壁際にある太いネジに専用のレンチを使用して左右させます。
高度の方ですが、このウェッジの下面にカマボコ型のステンレス棒が付いていてシーソーのような構造になっています。北と南にある金色の大きなナットを専用のレンチを使用して上下動させます。鏡筒が載った状態で行いますから下げるのは簡単ですが上げるのは大変です。マニュアルにも高めにしておいて少しずつ下げながら調整しろと書いてあります。
この方位高度調整ネジ・ナットのヘッドは六角ではなく歯車のような多角形なため、狭いところで細かく回すことができるので、このように壁際ギリギリの配置でも回せるのが優秀です。
極軸合わせのやり方はどの赤道儀でも基本的に同じですので割愛してもいいですよね。
ここで、この赤道儀を制御するソフトウェアの説明をしたいと思います。
みなさんが普通に天体撮影に使用しているソフトウェアはなんでしょう?
私はタカハシEM-400を使用する時は、
Cartes du Ciel (フリーのプラネタリウムソフト)
PHD2 (フリーのオートガイドソフト)
All Sky Plate Solver (フリーのプレートソルバー)
MaxImDL (有料の撮影ソフト)
くらいでしょうか。
いずれもASCOM Temmaドライバーを使用していますので、赤道儀の初期化もASCOM Temmaドライバーがやってくれているはずです。
PlaneWave Lシリーズ赤道儀もPWI4というソフトウェアをインストールするとASCOMドライバーもインストールされますので、上記のようなASCOM対応ソフトが使用できます。ですが、PWI4でしかできない必須操作があります。
・モーターチューニング
この赤道儀に搭載された鏡筒などの機器のペイロード(荷重のことです)測定
です。鏡筒を載せ替えたりしなければ、設置時の一回で済みます。
Quick,Normal,Thoroughの3種類ありますが、いろいろな方向を向かせるかどうか
の違いだけです。ペイロード測定は2Hz〜1250Hzまで刻んでモーターで両軸を
振動させることで判断しているようです。
・モデリング
全天の任意の位置を20箇所ほど指定してプレートソルビングを自動で行います。
マニュアルでは撮影ソフトとしてMaxImDLの画面が載っていますが、他の撮影
ソフトでできるかは試したことがありません、MaxImDLはトライアル版でも
使えます。これも設置時の1回だけです。プレートソルブはとても高速です、
また、撮影とプレートソルブは非同期で進みますので時間はかかりません。
・ホームポジション動作
原点の検出動作をします、電源を入れるたびに1回実行する必要があります。
鏡筒が素早く大きく動きますので、近くにいない方がいいです、ボヤッと
してると殴られます(笑)
※ 追記 2024-01-24
ホーミング動作の動画が見れない状態でしたがやっと直しました ゴメンナサイ。
私の場合は、先に記載したようにバランシングアクセサリーが床に衝突するため、北東の一部には向けられませんので、モーターチューニングは[Quick]で、モデリングは北東を避けてポイント指定しました。観測所の立地によっては様々な障害物があって撮影画像を取得できない方向があるのは普通ですから、満遍なくポイントできなくても対象導入精度にはさほど影響はありません。雲が邪魔してプレートソルブに失敗したポイントが出ても中断せず正常にモデリングが完了します。
モーターチューニングやモデリングが正しくできていれば、PHD2もプレートソルブも必要ないのでPWI4のプラネタリウム画面で対象導入して(一発でど真ん中に入ります)MaxImDLやお好きな撮影ソフトで快適に撮影できるでしょう。
ASCOM対応なので自動導入も使い慣れたソフトも使用できるはずです。
オートガイドはしないの?と思われるでしょうが2600mm,180秒程度でしたらちゃんと点像に写ります。PHD2でも良い成績が出せるはずですが。
※ 追記 2023-11-26
現在はPHD2オフアキガイドで運用しています。
モデリング(全天一括プレートソルブ)の様子を追加します。対象移動〜撮影〜プレートソルブを
自動的にループします。StatusがAddedToModelになれば成功です。

※ 追記 2025-08-29
これまではモデリングでMaxImDLという撮影ソフトが必要でしたが、PWI4がバージョンアップされてPWI4からASCOM接続カメラをコントロールすることが可能になりました。MaxImDLは必要ではなくなり、新たに[Camera]タブが追加され、撮影に使っているASCOMカメラを選択できます。


では電源オンから撮影までの大まかな手順を画面で見てみましょう。
① 電源をオンにし、Connect→Enable RA→Enable DEC→Home mount で
原点検出動作をします。
②対象を星図画面でクリックするか、検索画面を出してカタログ番号で選びます。
GoToで鏡筒が対象へ向きます。

ICやArp天体はローカルカタログにないですが、インターネットにアクセス可能であればOnline Searchできます。

GoToしたあとは自動的に追尾が始まります。
Trackingタブを見てみると、モーターの動きとエンコーダーで読み取った値との差がRMSとしてグラフ表示されます。左下グリーンの欄に平均RMSが表示されていますが、0.05秒角〜0.06秒角と良好に動作しています。0.2秒角を超えるようであれば、搭載重量オーバーやバランスが取れていない状態と思われます。
このグラフはPHD2に似てますが、PHD2は実際の星像との差であることが大きく違います。

試しに搭載重量オーバーにするとこうなります。触ってみると鏡筒が細かく振動しているのがわかりますし、星像も伸びてしまいます。
この記事の上の方で、GSO16AとCCA-250を載せてカメラがZWO ASIカメラでは良好だったのが、SBIG STL-11000Mに交換しただけで(2kgオーバー?)このようになってしまいました。もちろんバランスは取り直したつもりです。

オートガイド(もちろんオフアキシスガイド)が必要かどうかは気流や考え方次第かなと思っています。私は今のところ、撮影結果的に必要ないと判断しました。今日はガイドの調子がどうのという負担から解放されるのはとてもスッキリします。
※ 追記 2023-11-26
ガイド不要と書いてしまいましたが、一晩中同一対象を取り続けていますと、
わずかなズレが蓄積されて、撮影開始と終わりで構図が変わってしまいました。
そのため、現在はPHD2でオフアキガイドしています。
この赤道儀の売り文句は、
・ダイレクトドライブでギアがないのでバックラッシュゼロ、
ピリオディックエラーゼロ、高速駆動、ほぼ無音
・高精度エンコーダーが装備されており対象を一発で真ん中に導入できる
・片持ちフォークのため鏡筒を取っ替え引っ替えできる、アウトサイドにも同架できる
・搭載重量の割に自重が軽くコンパクトである
・ギアのような摩擦がないため摩耗がなく耐久性がある、グリスなどのメンテも不要
といった感じでしょうか。
ただし、以下、私見です。
無音、静音というのは異議があります。確かにダイレクトドライブモーターは無音です、が、冷却ファン?の音はかなりうるさく、ルーフを閉めた状態でも外から電源が入っていることがわかるレベルです。深夜の住宅密集地でルーフ開放したら問題になりかねません。モーターチューニング時の音もすごいです。100Hz以上の可聴域の測定では本体や鏡筒が共振して大きな音が出ます。おそらく隣家の部屋の中から聞こえるでしょう。
だからと言って他のメリットをスポイルすることはないと思いますが、どこでも設置できるということにはならないと思われます。
※ 追記 2023-11-26
冷却ファンはL-500,L-550,L-600に装備されているので、L-350はほぼ無音と思われます。
冷却ファンを静音タイプに交換すれば改善されると思いますが、メーカー保証は無くなるでしょう。
私見ついでですが、このPlaneWave Lシリーズがどのような観測スタイルに向いているか考えてみました。
搭載重量50kgクラスでポピュラーなのはSkyWatcher EQ8Rでしょうか。エンコーダなしなら圧倒的なコストパフォーマンスです。ではそれ以上の搭載重量はどうでしょう。ASA DDM100(100kg),Astro Phygics 1600GTO(100kg),Mathis Instruments MI-750(90kg),Software Bisqueが候補に上がってきます。載せる鏡筒の大きさを考慮するとフォーク式が不動点が低くて有利な気がします。
最近は遠征撮影でも複数の赤道儀を同時運用している方を多く見かけます。理由は撮影機会が限られており、条件のいい時に撮れ高を稼ぎたいという思いがあるでしょうね。露出は正義という言葉もよく聞きますし、総露出時間がS/N比を左右するのは否めません。スライディングルーフの建設が多いのも、複数の赤道儀を同時運用したいという意識の表れかと思います。
そういったニーズから、天井高の低いスライディングルーフで運用しやすく、最もポピュラーな南北2.4mクラスでの複数運用に向いている赤道儀だと感じています。
いかがでしたでしょうか?
こんな長い記事をここまでお読みくださってありがとうございます。
国内正規代理店もできましたし、ユーザーが増えて集合知が充実していくのを楽しみにしています。